/**********************************************************************
Filename : Control Servo by Potentiometer
Description : Use potentiometer to control the rotation of servo motor.
Auther : www.freenove.com
Auther : www.freenove.com
Modification: 2022/10/25
**********************************************************************/
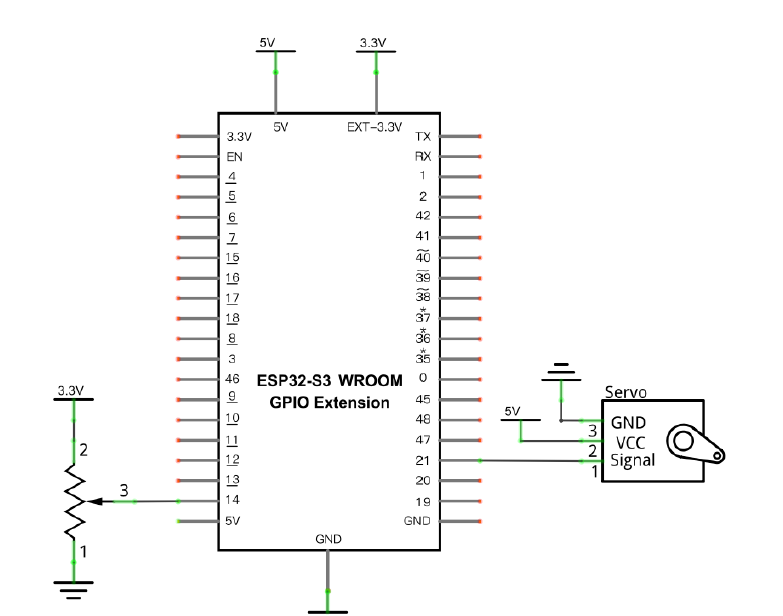
#define SERVO_PIN 21 //define the pwm pin
#define SERVO_CHN 0 //define the pwm channel
#define SERVO_FRQ 50 //define the pwm frequency
#define SERVO_BIT 12 //define the pwm precision
#define ADC_PIN 14 //define the adc pin
void servo_set_pin(int pin);
void servo_set_angle(int angle);
void setup() {
servo_set_pin(SERVO_PIN);
Serial.begin(115200);
}
void loop() {
// read the value of the potentiometer (value between 0 and 4095)
int potVal = analogRead(ADC_PIN);
Serial.printf("potVal_1: %d\t",potVal);
// scale it to use it with the servo (value between 0 and 180)
potVal = map(potVal, 0, 4095, 0, 180);
// set the servo position according to the scaled value
servo_set_angle(potVal);
Serial.printf("potVal_2: %d\r\n",potVal);
delay(15);// wait for the servo to get there
}
void servo_set_pin(int pin) {
ledcSetup(SERVO_CHN, SERVO_FRQ, SERVO_BIT);
ledcAttachPin(pin, SERVO_CHN);
}
void servo_set_angle(int angle) {
if (angle > 180 || angle < 0)
return;
long pwm_value = map(angle, 0, 180, 103, 512);
ledcWrite(SERVO_CHN, pwm_value);
}



コメント