前回は部品の確認とプログラミング環境のセットアップ・動作確認を行いました。
今回から組み立てを行っていきます。早い子は1時間で終わりますが、多くの子は1時間では終わらないです。2時間くらい見ておいたほうが良いです。
その1 モーターとホイール
モーターブラケットをシールドに固定していきます。
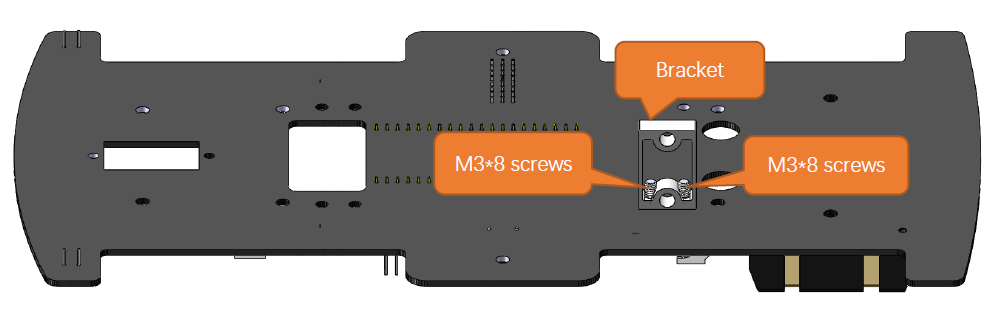
以下のようにシールドの底面にモーターブラケットを取り付けます。
M3*8のネジを電池ボックス側から差し込み固定します。
Mはミリネジの意味。ネジにはミリネジとインチネジの2種類があります。よく間違えてネジ山を潰してしまうことがあります。3はネジの太さです。8は長さ8ミリという意味です。ネジを無くしたときは、『M3*8のネジ』と分かればホームセンターで買うことができます。
少しぐらつく程度まで締めましょう。このときに完全に締め切ってしまうと、モーターを取り付けるときに苦労します。また、ホイールが微妙に内向きあるいは外向きになってしまうことが多々あるので、ホイールを付けるまでは完全に締め切らなくて良いです。
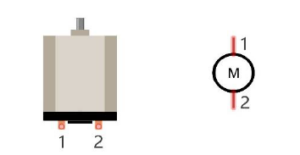
つぎにモーターを取り付けます。モーターの向きは『黄色のギアが外側、モーターが内側』かつ『コードが内側』です。
モーターの外側からネジを差し込み、ナットで固定します。
プラスドライバーを使うときのコツは『上からしっかりと力を入れて、ネジ山を舐めないようにする』です。
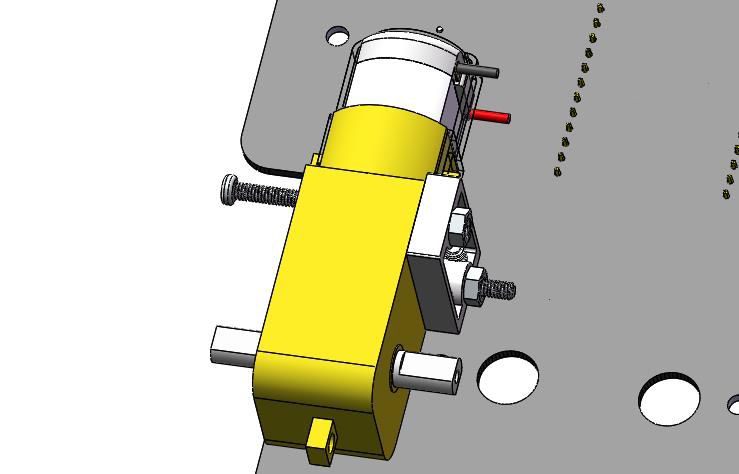
モーターを固定したら、ブラケットがぐらつかない程度に増し締めしましょう。あとでホイールをつけるときにぐらつくと破損する恐れがあるためです。
4箇所ともモーターを付けたら次に進みましょう。
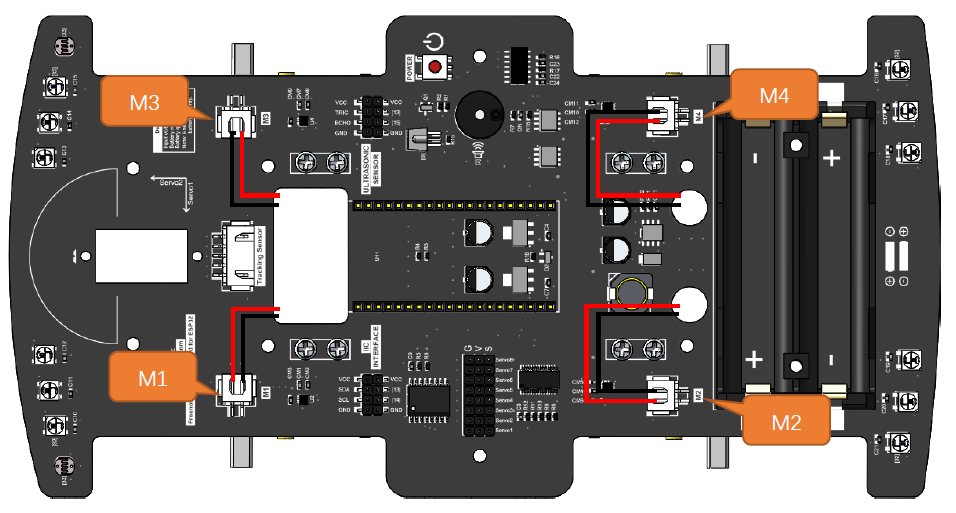
次はモーターから出ているワイヤーをシールドに接続します。使っているコネクタはJST(日本圧着端子製造)という会社の規格、XHコネクタです。2ピンなのでXH-2Pなんて言ったりします。電子工作ではメジャーな端子で、ご家庭でも圧着できるので、壊しても修理しやすいです。
次にホイールを取り付けます。ホイールの穴は円形ではありません。差し込むときに向きを意識して差し込みましょう。
ホイールを取り付けると、ブラケットが曲がっていたかどうか一目瞭然です。もしも曲がっていたら、ブラケットを固定しているネジを緩めてまっすぐになるように調整しましょう。
調整しなくても、走行したときに勝手に曲がってしまうだけなので、あえてそのまま失敗させるのも学びにつながるかもしれません。大人が『失敗しないように』と導きすぎるよりも、失敗から考えて軌道修正をするほうが、考える力がつくと考えています。

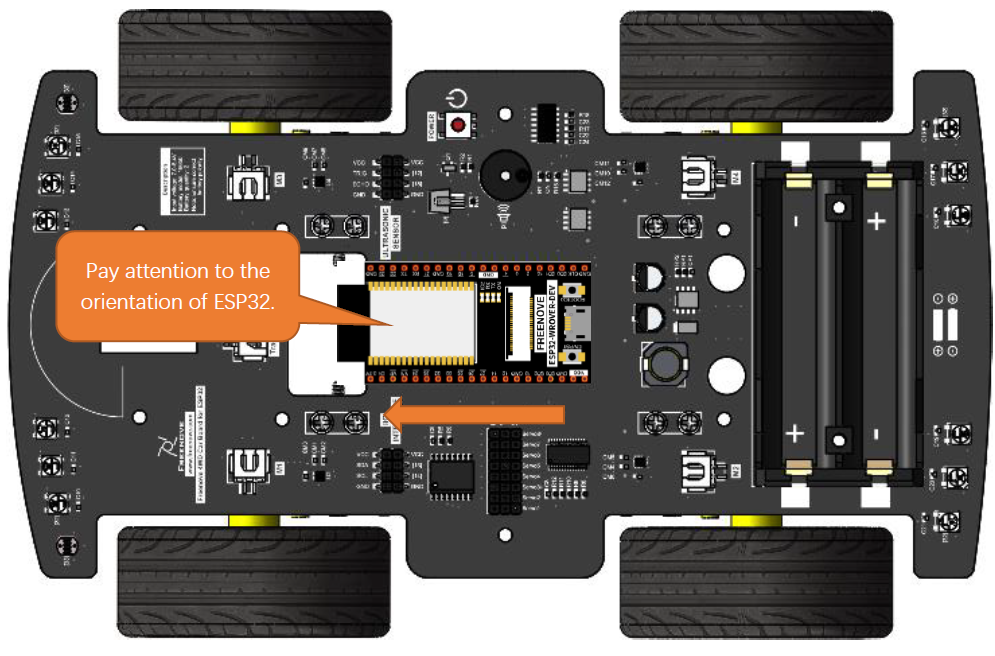
その2 ESP32の取り付け
1限目で既に取り付けているはずなので、外していなければスキップして大丈夫です。ESP32を取り付けるときは向きに気をつけましょう。シールドの開口部にアンテナが来るような向きです。電池ケース側にUSBインターフェースです。
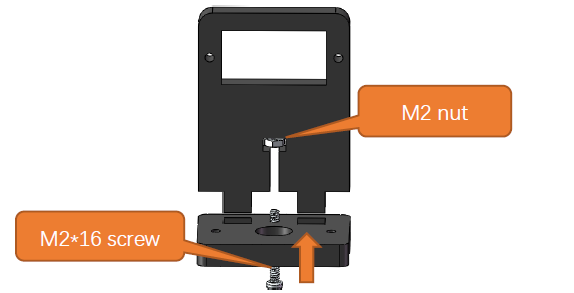
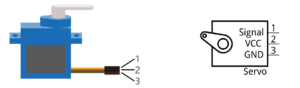
その3 サーボの取り付け
1つ目のサーボを取り付けます。サーボをモーター側から差し込んで、ESP32側からM2*16ネジとモーター側のM2ナットで固定します。

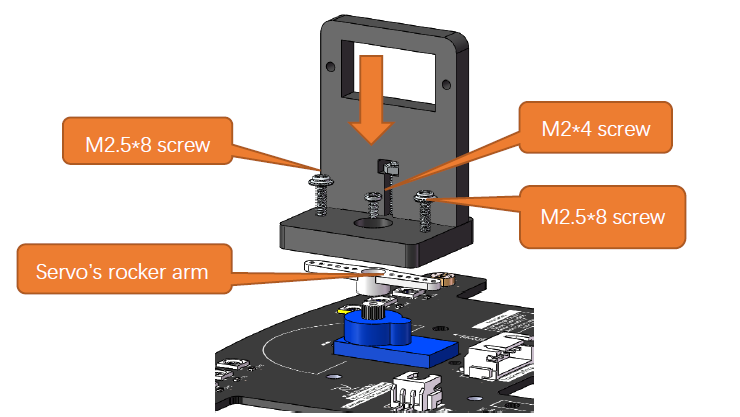
アクリルパーツを組み立てます。保護紙を外すときは、今のところ爪でカリカリするしか、良い方法がありません。セロハンテープなどで剥がすことも試してみましたが、うまくいきませんでした。
サーボにロッカーアームを取り付け、アクリルパーツを固定します。1限目の最後にも書きましたが、このときサーボが90度の状態で止まっていることを前提としています。もし270度にして遊んでいた場合は、もう一度90度で固定するように、最初のコードに戻して実行しておいて下さい。じゃないと顔が明後日の方向に向いてしまいます。使うネジはロッカーアームに付属しているものです。M2.5*8のネジはこのキットの中で初めてメス側にネジが切ってないタイプになります。取付時の感触が変わる点に注意しましょう。
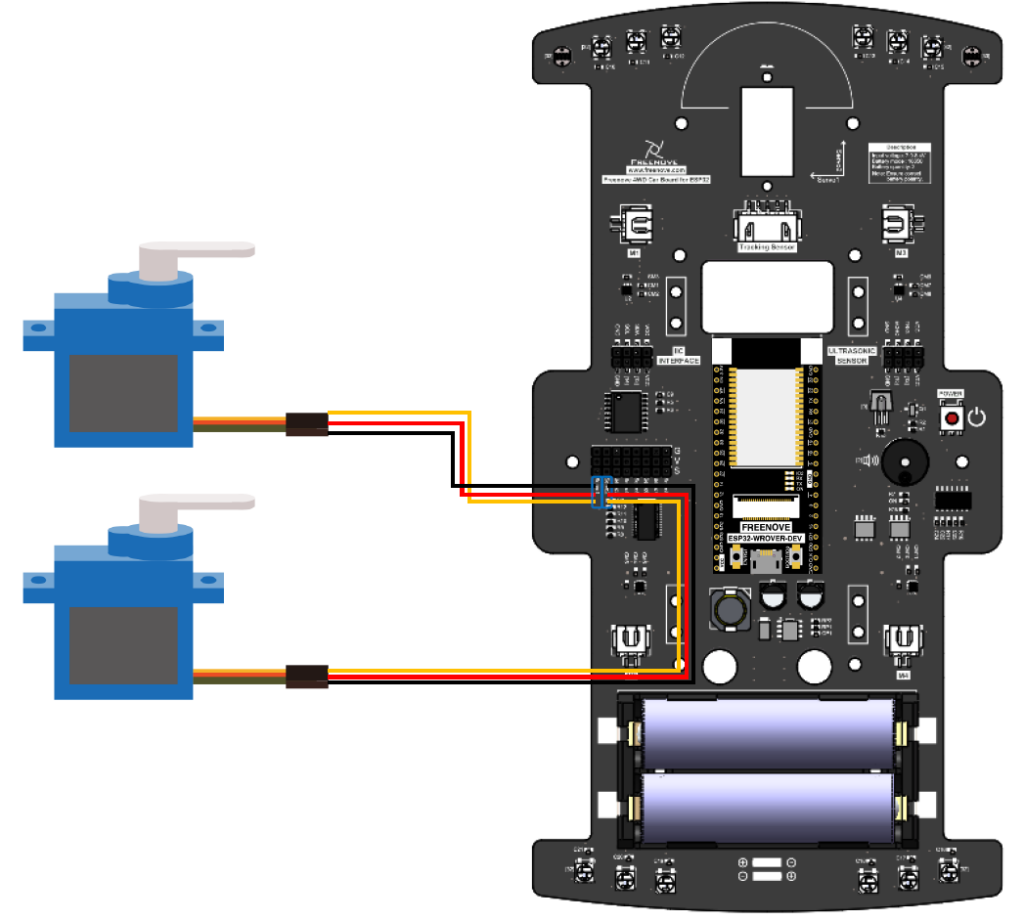
2つ目のサーボを取り付けます。

サーボをシールドに結線します。1限目のときと同じで、ワイヤーの向き(色)に注意しましょう。サーボ1はESP32のアンテナ側の穴を通しましょう。
今日の教室はここまでです。
お疲れ様でした。
コメント