前回まででロボットカーの組み立てが終わりました。
今回はせっかく組み立て終わったので、一度どんな事ができるのか遊んでみましょう!
遊ぶためにデモ用のプログラムをアップロードします。その前に各種ライブラリを読み込ませる必要があります。
ライブラリのインストール
Arduino IDE を開いて、『スケッチ』⇒『ライブラリをインクルード』⇒『.ZIP形式のライブラリをインストール』と進みます。
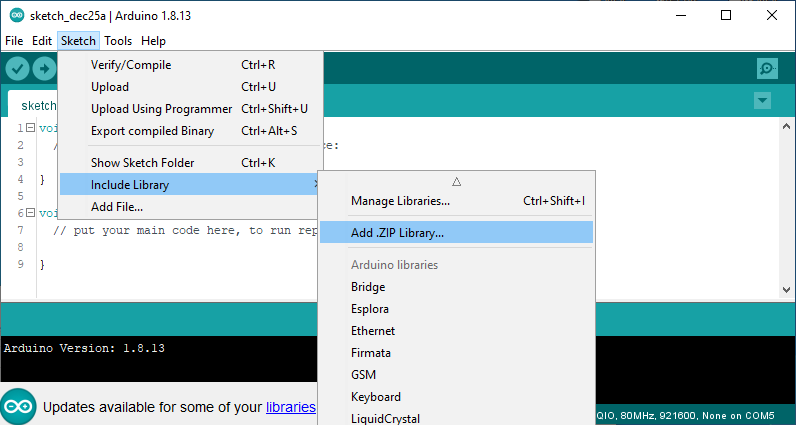
『Freenove_4WD_Car_Kit_for_ESP32\Libraries』フォルダの中にあるすべてのファイルを順にインストールしていきましょう。

上記の画像では、フォルダを指定できるように見えますが、現行バージョンではファイル一つしか選択できない様になっていると思います。ですので、zipファイルのかず分だけ、この手順を繰り返してください。
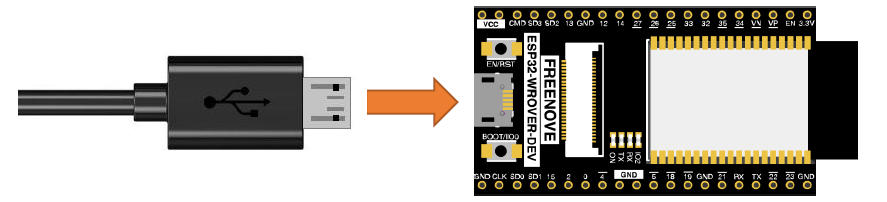
ESP32の接続
PCとESP32を接続しましょう。
プログラムのアップロード
Arduino IDE の画面に戻ります。
『Freenove_4WD_Car_Kit_for_ESP32\Sketches\05.3_Multi_Functional_Car』フォルダにある『05.3_Multi_Functional_Car.ino』を開きます。(ファイルをダブルクリックすればArduino IDEで開けます)
以下のアップロードボタン(→)を押して、プログラムのコンパイルとアップロードを行いましょう。

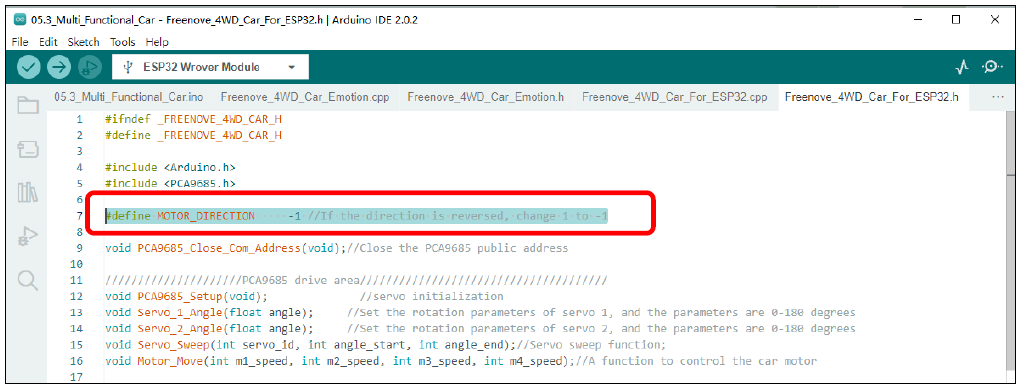
このチュートリアルで、もし意図した動きとは反対方向に車が動くことに気づいた場合(例:前進するはずが後退する、左折するはずが右折するなど)、”Freenove_4WD_Car_For_ESP32.h” という名前のファイルを修正することで、値をコメントに従って変更すれば解決できます。
標準では正面から見た時の動きとして設定されています。
リモコンについて
アップロードが終わったら、ロボットカー本体に電池を入れましょう。プラスとマイナスを間違えないように気をつけましょう。
リモコンの電池保護フィルムを外して遊んでみましょう!

今回のプログラムではリモコンは以下のような動作をします。
| ボタン | キーバリュー | 機能 | ボタン | キーバリュー | 機能 |
|---|---|---|---|---|---|
| FF02FD | 前進 | TEST | FF22DD | ブザーが鳴る | |
| FFE01F | 左に回る | 2 | FF18E7 | ランダムに表情を変える | |
| FF906F | 右に回る | 5 | FF38C7 | 表情を消す | |
| FF9867 | バック | 7 | FF42BD | カラーLEDをランダムに光らせる | |
| FFA857 | 停止 | 8 | FF4AB5 | カラーLEDを消す | |
| 0 | FF6897 | サーボ1(顔)が左を向く | C | FFB04F | サーボ2(顔)が下を向く |
| 1 | FF30CF | サーボ1(顔)が右を向く | 3 | FF7A85 | サーボ2(顔)が上を向く |
| 4 | FF10EF | サーボ1(顔)が正面(90°)を向く | 6 | FF5AA5 | サーボ2(顔)が正面(90°)を向く |
この表の動作はプログラムの中で決めているだけなので、プログラムを書き換えることで、ボタンと動作を変更することができます。それはまた後々やっていきましょう。
次回からは個々のモジュールについて動作テストをしてみましょう。
コメント